

-
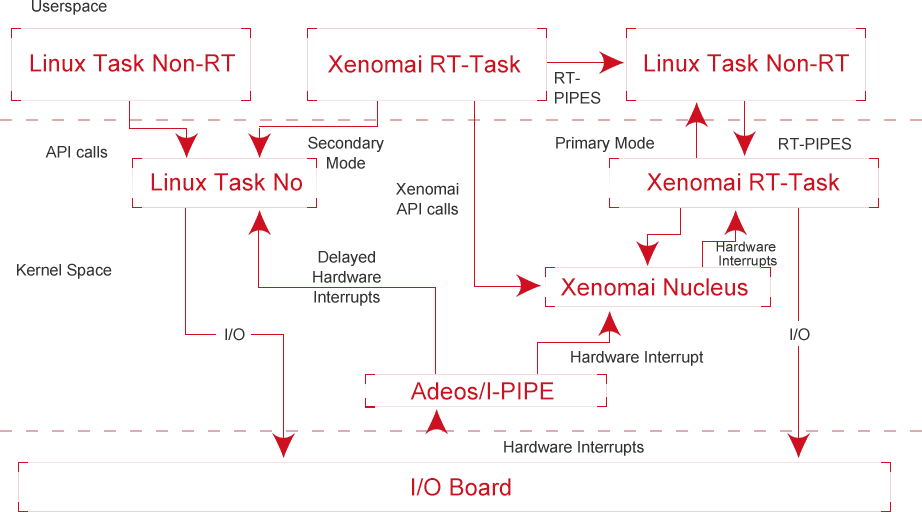

基于Linux+Xenomai實時環境搭建
采用雙內核機制的Linux內核的強實時擴展。為開發強實時性應用提供了豐富的功能,為機器人運動規劃提供了可靠的運行環境。阿童木機器人控制系統基于ROS+OROCOS平臺開發,是國內唯一并聯機器人專用的控制系統。
-

基于ROS+OROCOS平臺控制系統
在ROS平臺基礎上,機器人控制系統綜合事件驅動架構和分層架構,進行機器人控制和操作應用處理的模塊,如視覺系統,機器人運動控制中樞,人機交互界面等之間使用ROS的topic和service進行通訊,模塊的部署和交互耦合度低,易于開發和維護。同理,ROS則是對機器人的硬件進行了封裝,不同的機器人、不同的傳感器,在ROS里可以用相同的方式表示(topic等),供上層應用程序(運動規劃等)調用。
-
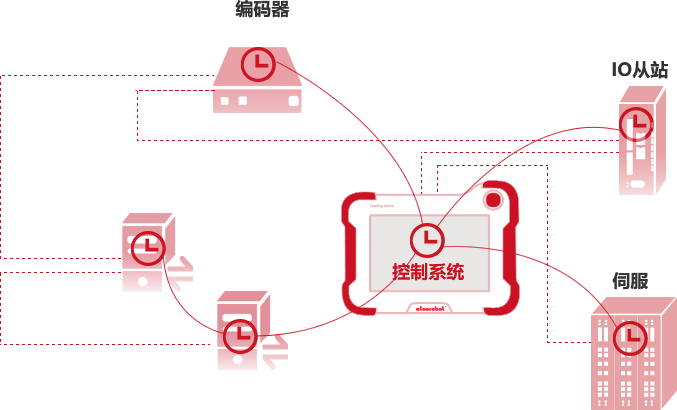

基于Acontis的Ethercat通訊主棧
基于以太網的開發構架的實時工業現場總線通訊協議,是最快的工業以太網技術之一,提供納秒級精確同步。具有高性能、拓撲結構靈活、應用容易、低成本、高精度設備同步等特點。
核心技術
-


多機器人
模型支持.jpg)
除2軸、3軸、3+1等經典并聯構型外,還支持5軸、6軸串并混聯機型以及stewart平臺。
-


復雜軌跡
記憶.jpg)
通過樣條曲線擬合軌跡,可實現復雜示教軌跡的記憶跟蹤。
-


速度前瞻
.jpg)
通過速度前瞻技術,獲取更平滑的速度曲線,在加速度變化頻繁的場合仍然可以得到平滑的速度曲線,提高機器人運行效率。
-


拖動示教
.jpg)
通過直接手持牽引機器人,記錄示教過程的位姿數據,以直觀方式對機器人應用任務進行示教。
-


主動抑振
.jpg)
通過抑振算法有效減小機器人在高速驟停時引起的機械震蕩,提高機器人高速運行下的定位精度。
-


外部軸聯動

除本體之外,還可控制多個外部伺服軸進行獨立或與機器人同步的多軸聯動。
-


動態跟蹤
.jpg)
在機器人視覺或編碼器的加持下,可對沿直線、圓弧運行物體的實現隨動抓放。
-


碼垛功能
.jpg)
提供碼垛算法,輸入碼垛構型即可自動生成運動軌跡提高效率。
-


物聯網植入
.jpg)
連接物聯網模塊,通過手機即可遠程觀察設備當前運行狀態。
-


SoftPLC
Soft PLC是除了通過在Hmi界面輸入命令之外,與用戶交互的另外一個接口。用戶通過Soft PLC可以進行PLC編程,管理和控制控制器上連接的IO。
-


圓盤追蹤
.jpg)
通過視覺獲取物體信息,并通過機械手與圓盤傳送帶建立運動關系,實時追蹤圓盤上物體的運動軌跡。
-


區域監控
.jpg)
通過設定工作區域與禁止區域免發生碰撞等意外情況控制系統會實時監控機器人的工作空間,通過監控區域的關系來控制機械手的啟停。
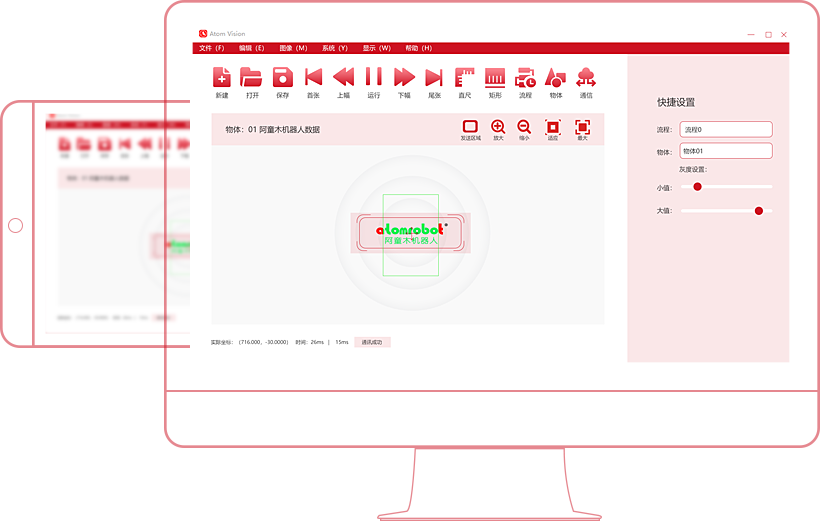
視覺系統
AtomVision提供高效的物體識別定位功能,包含多種目標識別算法,為機器人運動提供精確的目標位置。內含多種實用工具,方便設置和調試,并為調試人員提供友好的操作界面,目前已廣泛應用于多種實際項目中。
01 01
跨平臺視覺系統
支持windows/linux的跨平臺應用,可實現在不同平臺上的視覺應用部署。
02 02
多種目標識別算法
支持Blob、模板匹配、字符二維碼識別,工件定位等多種檢測手段。
顏色提取
顏色提取
視覺標定

視覺標定
blob分析

Blob分析
邊緣匹配

邊緣匹配
測量工具

測量工具
二維碼
識別

二維碼識別
模板匹配

模板匹配
條形碼
識別
條形碼識別
圓查找
圓查找
03 03
簡單快捷的用戶交互界面操作
針對用戶習慣、開發灰度、物體流程的快捷操作界面。同時提供相機夾角、計算像素比、9點示教,多客戶端/服務器支持等方面用戶操作的功能。

