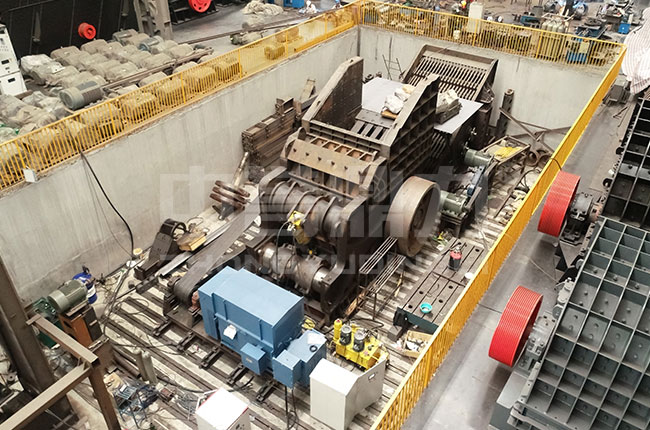
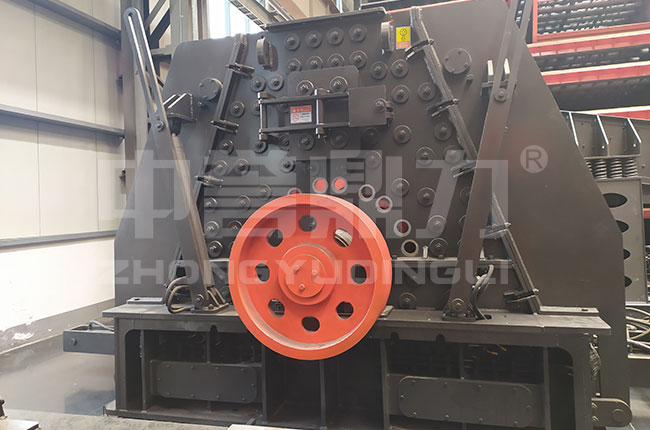
新鄉市鼎力礦山設備有限公司是一家從事礦山破碎機設備研發、生產、銷售于一體的大型礦山設備生產廠家,從事礦山行業已經三十多年,承接各種大型砂石骨料生產線建設,單條生產線產量可達日產3萬噸。主要研發生產設備有重型錘式破碎機、整形式錘式破碎機、ZSJ雙轉子制砂機等破碎機設備及振動篩、振動給料機、洗砂機、除塵器等配套設備以及皮帶等輸送設備。公司總部位于鄭州新鄉市衛輝唐莊鎮工業園區,下轄多個子級服務。自2004年成立以來,公司秉承現代企業的科學管理方法,精工制造,不斷創新,迅速發展壯大成為我機械制造行業的一顆璀璨明珠。"中譽鼎力"以通過ISO9001質量體系認證,是河南省質量技術監督局認證的質量興企科技創新企業,生產產品質量,服務范圍廣,歡迎新老客戶前來參觀考察洽談!
豫ICP備2021022030號-1 豫公網安備:41078102000031號版權所有:河南中譽鼎力智能裝備有限公司地圖法律聲明